AUFS ストレージドライバーの利用
読む時間の目安: 8 分
AUFS とは ユニオンファイルシステム(union filesystem)の一種です。
The aufs storage driver was previously the default
storage driver used for managing images and layers on Docker for Ubuntu, and for
Debian versions prior to Stretch. If your Linux kernel is version 4.0 or higher,
and you use Docker Engine - Community, consider using the newer
overlay2, which has
potential performance advantages over the aufs storage driver.
メモ
ディストリビューションや Docker エディションの中には AUFS をサポートしていないものがあります。 サポートされているプラットフォームなどの詳しい情報は 前提条件 を参照してください。
前提条件
- For Docker Engine - Community, AUFS is supported on Ubuntu, and on Debian versions prior to Stretch.
- For Docker EE, AUFS is supported on Ubuntu.
- If you use Ubuntu, you need to add the AUFS module to the kernel. If you do
not install these packages, you need to use
overlay2. - AUFS cannot use the following backing filesystems:
aufs,btrfs, orecryptfs. This means that the filesystem which contains/var/lib/docker/aufscannot be one of these filesystem types.
aufsストレージドライバーの設定
Docker の起動時に AUFS ドライバーがカーネルにロードされていて、その他のス。トレージドライバーの設定がされていなければ、Docker はデフォルトでこの AUFS ドライバーを利用します。
-
以下のコマンドを実行して、利用するカーネルが AUFS に対応していることを確認します。
$ grep aufs /proc/filesystems nodev aufs -
Docker がどのストレージドライバーを利用しているかを確認します。
$ docker info <truncated output> Storage Driver: aufs Root Dir: /var/lib/docker/aufs Backing Filesystem: extfs Dirs: 0 Dirperm1 Supported: true <truncated output> -
If you are using a different storage driver, either AUFS is not included in the kernel (in which case a different default driver is used) or that Docker has been explicitly configured to use a different driver. Check
/etc/docker/daemon.jsonor the output ofps auxw | grep dockerdto see if Docker has been started with the--storage-driverflag.
aufsストレージドライバーはどのように動作するか
AUFS is a union filesystem, which means that it layers multiple directories on a single Linux host and presents them as a single directory. These directories are called branches in AUFS terminology, and layers in Docker terminology.
The unification process is referred to as a union mount.
The diagram below shows a Docker container based on the ubuntu:latest image.
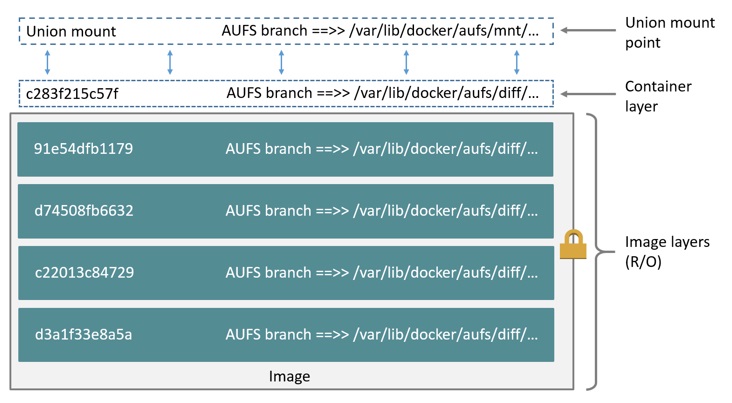
Each image layer, and the container layer, are represented on the Docker host as
subdirectories within /var/lib/docker/. The union mount provides the unified
view of all layers. The directory names do not directly correspond to the IDs
of the layers themselves.
AUFS uses the Copy-on-Write (CoW) strategy to maximize storage efficiency and minimize overhead.
イメージとコンテナーのディスク上の構成例
The following docker pull command shows a Docker host downloading a Docker
image comprising five layers.
$ docker pull ubuntu
Using default tag: latest
latest: Pulling from library/ubuntu
b6f892c0043b: Pull complete
55010f332b04: Pull complete
2955fb827c94: Pull complete
3deef3fcbd30: Pull complete
cf9722e506aa: Pull complete
Digest: sha256:382452f82a8bbd34443b2c727650af46aced0f94a44463c62a9848133ecb1aa8
Status: Downloaded newer image for ubuntu:latest
イメージレイヤー
Warning: Do not directly manipulate any files or directories within
/var/lib/docker/. These files and directories are managed by Docker.
All of the information about the image and container layers is stored in
subdirectories of /var/lib/docker/aufs/.
diff/: the contents of each layer, each stored in a separate subdirectorylayers/: metadata about how image layers are stacked. This directory contains one file for each image or container layer on the Docker host. Each file contains the IDs of all the layers below it in the stack (its parents).mnt/: Mount points, one per image or container layer, which are used to assemble and mount the unified filesystem for a container. For images, which are read-only, these directories are always empty.
The container layer
If a container is running, the contents of /var/lib/docker/aufs/ change in the
following ways:
diff/: Differences introduced in the writable container layer, such as new or modified files.layers/: Metadata about the writable container layer’s parent layers.mnt/: A mount point for each running container’s unified filesystem, exactly as it appears from within the container.
How container reads and writes work with aufs
Reading files
Consider three scenarios where a container opens a file for read access with aufs.
-
The file does not exist in the container layer: If a container opens a file for read access and the file does not already exist in the container layer, the storage driver searches for the file in the image layers, starting with the layer just below the container layer. It is read from the layer where it is found.
-
The file only exists in the container layer: If a container opens a file for read access and the file exists in the container layer, it is read from there.
-
The file exists in both the container layer and the image layer: If a container opens a file for read access and the file exists in the container layer and one or more image layers, the file is read from the container layer. Files in the container layer obscure files with the same name in the image layers.
Modifying files or directories
Consider some scenarios where files in a container are modified.
-
Writing to a file for the first time: The first time a container writes to an existing file, that file does not exist in the container (
upperdir). Theaufsdriver performs a copy_up operation to copy the file from the image layer where it exists to the writable container layer. The container then writes the changes to the new copy of the file in the container layer.However, AUFS works at the file level rather than the block level. This means that all copy_up operations copy the entire file, even if the file is very large and only a small part of it is being modified. This can have a noticeable impact on container write performance. AUFS can suffer noticeable latencies when searching for files in images with many layers. However, it is worth noting that the copy_up operation only occurs the first time a given file is written to. Subsequent writes to the same file operate against the copy of the file already copied up to the container.
-
Deleting files and directories:
-
When a file is deleted within a container, a whiteout file is created in the container layer. The version of the file in the image layer is not deleted (because the image layers are read-only). However, the whiteout file prevents it from being available to the container.
-
When a directory is deleted within a container, an opaque file is created in the container layer. This works in the same way as a whiteout file and effectively prevents the directory from being accessed, even though it still exists in the image layer.
-
-
Renaming directories: Calling
rename(2)for a directory is not fully supported on AUFS. It returnsEXDEV(“cross-device link not permitted”), even when both of the source and the destination path are on a same AUFS layer, unless the directory has no children. Your application needs to be designed to handleEXDEVand fall back to a “copy and unlink” strategy.
AUFS and Docker performance
To summarize some of the performance related aspects already mentioned:
-
The AUFS storage driver is less performant than the
overlay2driver, but is a good choice for PaaS and other similar use-cases where container density is important. This is because AUFS efficiently shares images between multiple running containers, enabling fast container start times and minimal use of disk space. -
The underlying mechanics of how AUFS shares files between image layers and containers uses the page cache very efficiently.
-
The AUFS storage driver can introduce significant latencies into container write performance. This is because the first time a container writes to any file, the file needs to be located and copied into the containers top writable layer. These latencies increase and are compounded when these files exist below many image layers and the files themselves are large.
Performance best practices
The following generic performance best practices also apply to AUFS.
-
Solid State Devices (SSD) provide faster reads and writes than spinning disks.
-
Use volumes for write-heavy workloads: Volumes provide the best and most predictable performance for write-heavy workloads. This is because they bypass the storage driver and do not incur any of the potential overheads introduced by thin provisioning and copy-on-write. Volumes have other benefits, such as allowing you to share data among containers and persisting even when no running container is using them.